





高级驾驶辅助系统ADAS
高级辅助驾驶系统基于不同的传感器技术,如图4所示。77GHz的雷达传感器目前已经在高端奢华轿车上的主动式巡航控制系统(ACC)上应用多年了。该系统的传感器可以测量前方车辆的速度以及两车之间的距离,同时可以监测自身车辆的速度和距离。目前已经在中级轿车和经济型轿车市场上开始应用的机载激光雷达(Lidar)传感器是远程传感器中比较经济的选择。相比于雷达,这种传感器发射激光脉冲,并能检测从其他物体反射回来的光线。与其他物体之间的距离可以通过信号延迟的时间来进行计算。

图4 重要的传感器
短程雷达传感器的工作频率是24GHz,用于监测车辆附近的物体。这种传感器一般安装在车辆的侧面,其信息用于盲点检测(BSD)和并线辅助(LCA)功能,比如在盲点中出现物体或者邻近车道车辆进入盲点时,会向司机提出预警。下一步,其信息能够与导航系统相结合,更好地实现车辆引导。安装在车辆前方或后方的24GHz雷达传感器可以用于预防碰撞发生。
视频传感器能够监测图像信息,比如侧面物体的大小和形状。视频传感器能够监测其他的道路使用者、交通信号和路标等情况。传感器发出的信息能够实现车道偏离警告和交通信号识别功能。
其他基础设施如交通信号、转弯或山坡等信息可以通过地图来获得。超声波传感器用于低速情况,比如停车,同时不需要高探测范围。而且内部数据可以收集起来提供给其他车辆。通过车对车通信进行数据传递,来监测车流密度。
另外,通过不同传感器获得的数据可以相互融合,用于增加系统功能或增强现有的功能。比如,雷达、摄像机和机载激光雷达与导航数据的融合对改善车辆性能十分重要。通过将从摄像机和地图的信息进行结合,就能提高交通信号识别系统的识别率。探测到的交通信号再与eHorizon的数据进行对比,eHorizon能够通过提供基于导航数据的道路基础设施详细信息来支持ADAS的功能。计算置信水平就能决定向司机显示哪种交通信号。融合这些传感器还能获得一种新的功能,即Sensitive Guidance,这是融合了雷达或摄像机系统的导航系统。导航系统的输出与交通情况、雷达或摄像机传感器相适应,比如监测盲点中或其他车道中的车辆。
无论是正常驾驶或在危险环境中驾驶,目前市场上多数驾驶辅助系统都是通过提供附加信息来帮助司机的,如图5所示。在上述两种情况中,系统都能够帮助减少碰撞事故的发生。高级驾驶辅助系统未来有两种发展趋势:
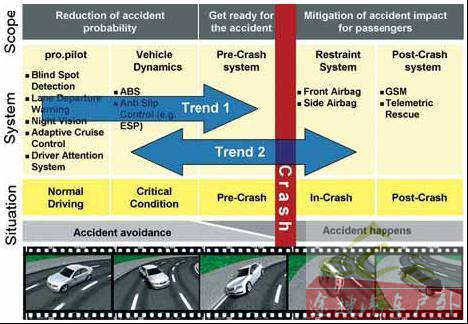
图5 主动和被动安全:未来的发展趋势
趋势1:从预警系统到干预系统都发生了一些变化。ADAS目前主要职责是在危急情况下提醒司机,比如盲点检测系统。系统未来将会向干预系统发展,即在限定的情况下对汽车进行控制。比如摄像系统将会从车道偏离预警系统向车道控制系统发展。
趋势2:将主动安全与被动安全系统结合起来。目前,碰撞中的被动安全系统与主动安全ADAS是相互独立的,比如安全气囊和预缩式安全带。它们之间没有相互的联系,比如在机载激光雷达、雷达或视频传感器监测到不可避免的碰撞时就让安全气囊做好准备。目前机载激光雷达传感器用于主动式巡航控制系统,能够在正常驾驶状态下为司机提供支持。未来,这些传感器将会与短程雷达(24GHz)和摄像机相结合,以便为安全气囊和预缩式安全带提供相应的准备信息。
完整的预防碰撞系统
这些发展趋势将会使预防碰撞系统更加完整,系统通过利用多种传感器技术监控车辆周围的环境,能够预先检测到不可避免的碰撞事故。在预防碰撞情况下,系统会干预车辆的动态性能(如制动)并预先触发被动安全系统。这种发展趋势意味着,车辆中的制动器、控制器和传感器的一体化。开发和实现这种ADAS系统还需要考虑到下列因素:协同、融合、结构和系统。
如果一个传感器只能实现一个功能,那就难以获得成本更为优化的解决方案。比如摄像机能够提供复合功能的数据,如监测路标、交通信号和其他道路的使用者等。协同功能允许系统通过增加部分软件来方便地实现功能的增加。如果复合传感器应用到一辆汽车上,这些传感器提供的数据就能够进行相互融合。这将使针对目标的信息更加丰富,使得探测的结果更加可信。在预防碰撞系统中,这种探测可靠性的增加使得系统干预和预警更加容易和有效。在车辆中使用复合传感器对车辆的结构产生了重大的影响,比如增加了电子控制单元ECU性能。因此,车辆应被视为一个完整的系统,是相互影响的各种元件的集合。
为了实现这些发展趋势,西门子VDO汽车公司参与了很多国际和国内的合作项目。目的是通过组合完整系统的方法来保证交通安全。安全系统将支持司机在各种交通情况中驾驶,从正常驾驶到潜在的不可避免的碰撞。安全系统包括交通情况分类、风险评估和行动观念。
总结
在过去的几年中,高级辅助驾驶系统的市场已经开始蓬勃发展。目前,以舒适性为导向的系统(如ACC)主要应用在中级或豪华轿车上。未来,这些系统将会被涵盖到安全系统当中,并且在经济型轿车中得以应用。
但是,高级辅助驾驶系统的发展不应该仅仅被视为一个技术问题,其中包括很多与司机之间的影响,以及和车辆结构之间的影响关系。这就使得系统需求的方法是非常复杂和重要的。西门子VDO汽车公司通过pro.pilot网络将自己视为一个系统集成者,更有效地来迎接挑战。





























